Hi,
I’m sharing a piece of my 3D modelling software which uses Panda3D.
The features that I code:
- The mouse behave like in Cinema4D software. Cinema4D has a very intuitive way to move, rotate and zoom the scene.
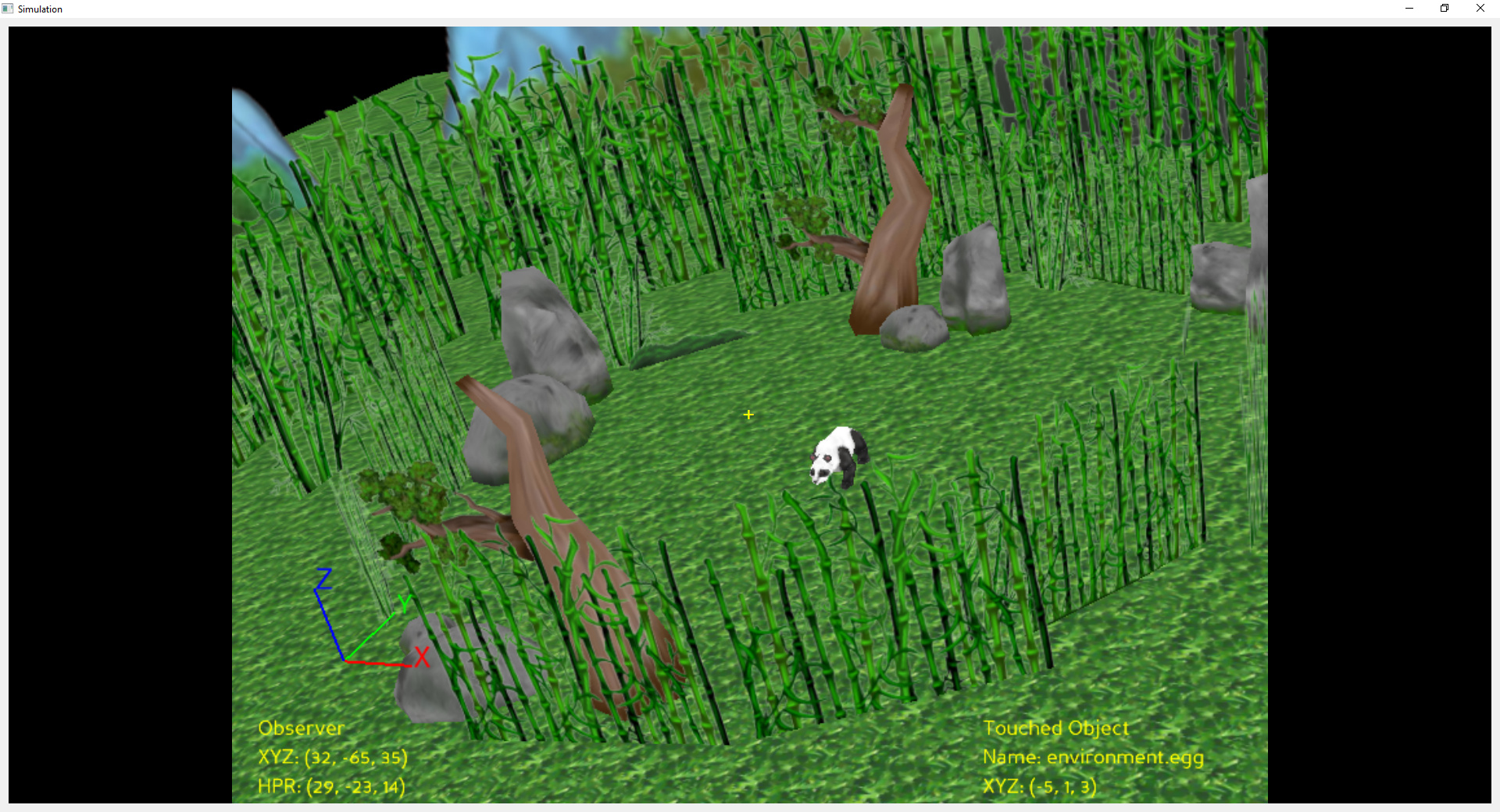
- The default Panda window is hidden and the video output is projected to a PyQt window (keeping aspect ratio). Furthermore, the mouse and keys commands are captured by the same PyQt window.
- Every time you manipulate a scene an gadget with XYZ axes shows the camera orientation, position as well as the objects picked/touched by the mouse cursor.
I hope this be useful to someone.
Mouse commands:
- Left-Button-Pressed: Rotate
- Middle-Button-Pressed: Pan
- Wheel: Zoom In/Out
Here we’re go:
import sys
from PIL import Image
from PyQt5 import QtGui, QtCore, QtWidgets
from direct.showbase.ShowBase import ShowBase
from direct.task import Task
from direct.actor.Actor import Actor
from panda3d.core import ClockObject, loadPrcFileData, GraphicsOutput, Texture, Point2, Point3, NodePath, LineSegs, TextNode
from panda3d.bullet import BulletWorld, BulletPlaneShape, BulletRigidBodyNode
class Color3D:
Black = (0, 0, 0, 1)
Gray = (0.5, 0.5, 0.5, 1)
White = (1, 1, 1, 1)
Red = (1, 0, 0, 1)
Green = (0, 1, 0, 1)
Blue = (0, 0, 1, 1)
Yellow = (1, 1, 0, 1)
def create_axes_cross(name, size, has_labels):
def create_axis_line(label, color, draw_to):
coords.setColor(color)
coords.moveTo(0, 0, 0)
coords.drawTo(draw_to)
# Put the axis' name in the tip
if label != "":
text = TextNode(label)
text.setText(label)
text.setTextColor(color)
axis_np = coords_np.attachNewNode(text)
else:
axis_np = coords_np.attachNewNode("")
axis_np.setPos(draw_to)
return axis_np
coords_np = NodePath(name)
coords = LineSegs()
coords.setThickness(2)
axis_x_np = create_axis_line("X" if has_labels else "", Color3D.Red, (size, 0, 0))
axis_y_np = create_axis_line("Y" if has_labels else "", Color3D.Green, (0, size, 0))
axis_z_np = create_axis_line("Z" if has_labels else "", Color3D.Blue, (0, 0, size))
node = coords.create(True)
coords_np.attachNewNode(node)
return coords_np, axis_x_np, axis_y_np, axis_z_np
class PandaApp(ShowBase):
def __init__(self):
# Set Panda3D configuration flags
loadPrcFileData("", "window-type offscreen")
ShowBase.__init__(self)
self.physics_manager = BulletWorld()
# Fill the dict with pairs like {'x': self.do_something}
self.key_map = {}
# Allow AI entities as much time as they need to think
self.frame_rate = 60
global globalClock
globalClock.setMode(ClockObject.M_forced)
globalClock.setFrameRate(self.frame_rate)
globalClock.reset()
# Necessary for scene visualization
self.mouse_feature = ""
self.start_mouse_work_fn = None
self.stop_mouse_work_fn = None
self.mouse_x = 0
self.mouse_y = 0
self.last_mouse_x = 0
self.last_mouse_y = 0
self.mouse_steps = None
# Instead of a window, we put the graphics to a texture which can be handled by other 3rd software like QT
self.screen_texture = Texture()
self.win.addRenderTexture(self.screen_texture, GraphicsOutput.RTMCopyRam)
# Create the coords widget for indicating axes directions
self.coords_np, self.axis_x_np, self.axis_y_np, self.axis_z_np, self.cam_label_np, self.cam_pos_np, self.cam_hpr_np, \
self.touched_label_np, self.touched_object_np, self.touched_pos_np = self.create_screen_widgets()
# Load the environment model.
self.scene_np = self.loader.loadModel("models/environment")
# Reparent the model to render.
self.scene_np.reparentTo(self.render)
# Apply scale and position transforms on the model.
self.scene_np.setScale(0.25, 0.25, 0.25)
self.scene_np.setPos(-8, 42, 0)
# Load and transform the panda actor.
self.panda_actor_np = Actor("models/panda-model",
{"walk": "models/panda-walk4"})
self.panda_actor_np.setScale(0.005, 0.005, 0.005)
self.panda_actor_np.reparentTo(self.render)
# Loop its animation.
self.panda_actor_np.loop("walk")
# Create a ground for collisions
shape = BulletPlaneShape((0, 0, 1), 3)
ground_node = BulletRigidBodyNode("ground-node")
ground_node.addShape(shape)
self.physics_manager.attachRigidBody(ground_node)
ground_np = self.scene_np.attachNewNode(ground_node)
# Adjust the scene elements
self.setBackgroundColor(Color3D.Black)
self.disable_mouse()
self.cam.setPos(10, -25, 15)
self.cam.lookAt(0, 0, 0)
self.camera_pivot_np = self.render.attachNewNode("camera_pivot")
self.camera_pivot_np.setPos(self.get_point_from_cam_lens((0, 0))[1])
self.cam.reparentTo(self.camera_pivot_np)
self.taskMgr.add(self.update, "update")
def update(self, task):
time_per_frame = self.get_time_per_frame()
self.update_camera()
self.physics_manager.doPhysics(time_per_frame)
return Task.cont
def get_time_per_frame(self):
return globalClock.getDt()
def start_mouse_work(self, feature, start_mouse_work_fn, stop_mouse_work_fn):
self.mouse_feature = feature
self.start_mouse_work_fn = start_mouse_work_fn
self.stop_mouse_work_fn = stop_mouse_work_fn
self.cam_label_np.show()
self.cam_pos_np.show()
self.cam_hpr_np.show()
self.touched_label_np.show()
self.touched_object_np.show()
self.touched_pos_np.show()
# Pick a position to act as pivot to the camera
if self.mouse_feature == "zoom":
target_pos = (self.mouse_x, self.mouse_y)
else:
target_pos = (0, 0)
self.touched_object, self.touched_pos = self.get_point_from_cam_lens(target_pos)
if self.touched_pos is not None:
# Move camera pivot to touched position
cam_pos = self.cam.getPos(self.render)
self.cam.reparentTo(self.render)
self.camera_pivot_np.setPos(self.touched_pos)
self.cam.reparentTo(self.camera_pivot_np)
self.cam.setPos(self.render, cam_pos)
self.start_mouse_work_fn()
def stop_mouse_work(self):
self.mouse_feature = ""
self.last_mouse_x = None
self.last_mouse_y = None
self.cam_label_np.hide()
self.cam_pos_np.hide()
self.cam_hpr_np.hide()
self.touched_label_np.hide()
self.touched_object_np.hide()
self.touched_pos_np.hide()
self.stop_mouse_work_fn()
def update_camera(self):
# Use mouse input to turn/move the camera.
if self.mouse_feature != "":
diff_x = (self.last_mouse_x - self.mouse_x) if self.last_mouse_x is not None else 0
diff_y = (self.last_mouse_y - self.mouse_y) if self.last_mouse_y is not None else 0
self.last_mouse_x = self.mouse_x
self.last_mouse_y = self.mouse_y
if self.mouse_feature == "rotate":
offset = 5000 * self.get_time_per_frame()
self.camera_pivot_np.setH(self.camera_pivot_np.getH() + diff_x * offset) # horizontal plane
self.camera_pivot_np.setR(self.camera_pivot_np.getR() - diff_y * offset) # vertical plane
elif self.mouse_feature == "pan":
offset = 15000 * self.get_time_per_frame()
self.camera_pivot_np.setZ(self.cam, self.camera_pivot_np.getZ(self.cam) + diff_y * offset) # horizontal plane
self.camera_pivot_np.setX(self.cam, self.camera_pivot_np.getX(self.cam) + diff_x * offset) # vertical plane
elif self.mouse_feature == "zoom":
offset = 0.1 * self.get_time_per_frame()
diff = self.cam.getPos(self.render) - self.camera_pivot_np.getPos(self.render)
self.cam.setPos(self.render, self.cam.getPos(self.render) - diff * self.mouse_steps * offset)
self.stop_mouse_work()
# Format the camera info text
cam_pos = tuple([round(n, 2) for n in self.cam.getPos(self.render)])
cam_hpr = tuple([round(n, 2) for n in self.cam.getHpr(self.render)])
cam_pos_text = "XYZ: ({:d}, {:d}, {:d})".format(int(cam_pos[0]), int(cam_pos[1]), int(cam_pos[2]))
cam_hpr_text = "HPR: ({:d}, {:d}, {:d})".format(int(cam_hpr[0]), int(cam_hpr[1]), int(cam_hpr[2]))
# Update coordinates widget
hpr = self.render.getHpr(self.cam)
self.coords_np.setHpr(hpr)
hpr = self.cam.getHpr(self.render)
self.axis_x_np.setHpr(hpr)
self.axis_y_np.setHpr(hpr)
self.axis_z_np.setHpr(hpr)
# Show camera position and rotation
self.cam_pos_np.node().setText(cam_pos_text)
self.cam_hpr_np.node().setText(cam_hpr_text)
# Format the touch info text showing object and point touched by the cross
touched_object_text = ""
touched_pos_text = ""
if self.touched_object is not None:
touched_object_text = "Name: " + self.touched_object.getParent(0).getName()
if self.touched_pos is not None:
touched_pos_text = "XYZ: ({:d}, {:d}, {:d})".format(int(self.touched_pos[0]),
int(self.touched_pos[1]),
int(self.touched_pos[2]))
self.touched_object_np.node().setText(touched_object_text)
self.touched_pos_np.node().setText(touched_pos_text)
def get_point_from_cam_lens(self, target_pos):
# Get to and from pos in camera coordinates and transform to global coordinates
p_from, p_to = Point3(), Point3()
self.camLens.extrude(Point2(target_pos), p_from, p_to)
p_from = self.render.getRelativePoint(self.cam, p_from)
p_to = self.render.getRelativePoint(self.cam, p_to)
# Get the target coordinates which correspond to mouse coordinates and walk the camera to this direction
result = self.physics_manager.rayTestClosest(p_from, p_to)
if result.hasHit():
return result.getNode(), result.getHitPos()
else:
return None, None
def create_screen_widgets(self):
# Pin the coords in left-bottom of the screen
origin = [-1.4, 5, -0.85]
coords_np, axis_x_np, axis_y_np, axis_z_np = create_axes_cross("coords", 3, True)
coords_np.reparentTo(self.cam)
coords_np.setPos(self.cam, tuple(origin))
coords_np.setScale(0.1)
# Put the camera label ('observer') text in the left-bottom corner
origin = [-1.7, 5, -1.1]
text = TextNode("cam_label")
text.setText("Observer")
text.setTextColor(Color3D.Yellow)
cam_label_np = self.cam.attachNewNode(text)
cam_label_np.setPos(self.cam, tuple(origin))
cam_label_np.setScale(0.07)
# Put the camera position in the left-bottom corner
origin = [-1.7, 5, -1.2]
text = TextNode("cam_pos")
text.setText("XYZ:")
text.setTextColor(Color3D.Yellow)
cam_pos_np = self.cam.attachNewNode(text)
cam_pos_np.setPos(self.cam, tuple(origin))
cam_pos_np.setScale(0.07)
# Put the camera rotation in the left-bottom corner
origin = [-1.7, 5, -1.3]
text = TextNode("cam_hpr")
text.setText("HPR:")
text.setTextColor(Color3D.Yellow)
cam_hpr_np = self.cam.attachNewNode(text)
cam_hpr_np.setPos(self.cam, tuple(origin))
cam_hpr_np.setScale(0.07)
# Put the touch label text in the right-bottom corner
origin = [0.8, 5, -1.1]
text = TextNode("touched_label")
text.setText("Touched Object")
text.setTextColor(Color3D.Yellow)
touched_label_np = self.cam.attachNewNode(text)
touched_label_np.setPos(self.cam, tuple(origin))
touched_label_np.setScale(0.07)
# Put the touched objected in the right-bottom corner
origin = [0.8, 5, -1.2]
text = TextNode("touched_object")
text.setText("Name:")
text.setTextColor(Color3D.Yellow)
touched_object_np = self.cam.attachNewNode(text)
touched_object_np.setPos(self.cam, tuple(origin))
touched_object_np.setScale(0.07)
# Put the touched point in the right-bottom corner
origin = [0.8, 5, -1.3]
text = TextNode("touched_pos")
text.setText("Pos:")
text.setTextColor(Color3D.Yellow)
touched_pos_np = self.cam.attachNewNode(text)
touched_pos_np.setPos(self.cam, tuple(origin))
touched_pos_np.setScale(0.07)
return coords_np, axis_x_np, axis_y_np, axis_z_np, cam_label_np, cam_pos_np, cam_hpr_np, touched_label_np, touched_object_np, touched_pos_np
class SimulationWindow(QtWidgets.QWidget):
def __init__(self, panda_app):
QtWidgets.QWidget.__init__(self)
self.panda_app = panda_app
self.init_ui()
self.update_timer.start()
def init_ui(self):
# viewer_3d
self.viewer_3d = Viewer3D(self.panda_app)
self.viewer_3d.setAlignment(QtCore.Qt.AlignHCenter | QtCore.Qt.AlignVCenter)
# update_timer
self.update_timer = QtCore.QTimer(self)
self.update_timer.setInterval(1)
self.update_timer.timeout.connect(self.viewer_3d.update)
# layout
layout = QtWidgets.QGridLayout()
layout.addWidget(self.viewer_3d)
# Window
self.setLayout(layout)
self.setWindowTitle("Simulation")
self.setToolTip("Left-Button-Pressed: Rotate\r\nMiddle-Button-Pressed: Pan\r\nWheel: Zoom in/out")
class Viewer3D(QtWidgets.QLabel):
def __init__(self, panda_app):
QtWidgets.QLabel.__init__(self)
self.panda_app = panda_app
self.mouse_working_area = None
self.mouse_inside_working_area = False
self.pixel_map = None
self.init_ui()
def init_ui(self):
# pivot
self.pivot = QtWidgets.QLabel(self)
self.pivot.setText("+")
self.pivot.setFont(QtGui.QFont('Arial', 20))
self.pivot.setStyleSheet("QLabel { color : yellow }")
self.pivot.setVisible(False)
# Change background color
palette = self.palette()
palette.setColor(self.backgroundRole(), QtCore.Qt.black)
# self
self.setPalette(palette)
self.setMouseTracking(True)
self.setAutoFillBackground(True)
def update(self):
# Forward a step on Panda simulation
self.panda_app.taskMgr.step()
# Get the image to be draw on this viewer.
texture = self.panda_app.screen_texture
size = (texture.getXSize(), texture.getYSize())
format = "RGBA"
if texture.mightHaveRamImage():
image = Image.frombuffer(format, size, texture.getRamImageAs(format), "raw", format, 0, 0)
else:
image = Image.new(format, size)
# Draw the image.
_image = image.toqimage()
self.pixel_map = QtGui.QPixmap.fromImage(_image)
self.adjust_mouse_working_area()
def adjust_mouse_working_area(self):
if self.pixel_map is not None:
viewer_size = self.size()
self.setPixmap(self.pixel_map.scaled(viewer_size, QtCore.Qt.KeepAspectRatio, QtCore.Qt.SmoothTransformation))
image_size = self.pixmap().size()
horizontal_margin = (viewer_size.width() - image_size.width()) / 2
vertical_margin = (viewer_size.height() - image_size.height()) / 2
self.mouse_working_area = (horizontal_margin,
vertical_margin,
horizontal_margin + image_size.width(),
vertical_margin + image_size.height())
def resizeEvent(self, event):
self.adjust_mouse_working_area()
def handle_key_event(self, event, event_state):
# Inform Panda to start (or continue) the action associated with the key pressed
# or stop it if key is released
key_pressed = event.key()
# Check if key is in the user's key map an then call associated function
for k, value in self.panda_app.key_map.items():
if "-" in k:
[key_ascii, key_state] = k.split("-")
else:
key_ascii = k
key_state = ""
if key_state == event_state and QtGui.QKeySequence(key_ascii) == key_pressed and not event.isAutoRepeat():
(func, args) = value
func(*args)
break
def keyPressEvent(self, event):
self.handle_key_event(event, "")
def keyReleaseEvent(self, event):
self.handle_key_event(event, "up")
def create_start_mouse_work_fn(self, x, y):
def fn():
width = 20
height = 20
self.pivot.setGeometry(x - (width / 2), y - (height / 2), width, height)
self.pivot.setVisible(True)
return fn
def create_stop_mouse_work_fn(self):
def fn():
self.pivot.setVisible(False)
return fn
def mouseMoveEvent(self, event):
if self.mouse_working_area is not None:
def pyqt_to_panda(val, max):
mid = max / 2
return (val - mid) / float(mid)
# Check if mouse is on the image
mouse_pos = event.pos()
x, y = mouse_pos.x(), mouse_pos.y()
x0, y0, xn, yn = self.mouse_working_area
if self.mouse_working_area is not None and x >= x0 and x <= xn and y >= y0 and y <= yn:
self.mouse_inside_working_area = True
else:
self.mouse_inside_working_area = False
# Fix coordinates by removing margins of PyQT screen
x -= x0
y -= y0
width = xn - x0
height = yn - y0
# Transform coordinates from PyQt (0, n) to Panda (-1, 1)
self.panda_app.mouse_x = pyqt_to_panda(x, width)
self.panda_app.mouse_y = pyqt_to_panda(y, height) * (-1)
# Pass the movement commands to Panda
if self.mouse_inside_working_area and self.panda_app.mouse_feature == "":
feature = ""
if event.buttons() == QtCore.Qt.LeftButton:
feature = "rotate"
elif event.buttons() == QtCore.Qt.MiddleButton:
feature = "pan"
if feature != "":
start_fn = self.create_start_mouse_work_fn(self.width() / 2, self.height() / 2)
stop_fn = self.create_stop_mouse_work_fn()
self.panda_app.start_mouse_work(feature, start_fn, stop_fn)
def mouseReleaseEvent(self, event):
self.panda_app.stop_mouse_work()
def wheelEvent(self, event):
if self.mouse_inside_working_area:
mouse_pos = event.pos()
start_fn = self.create_start_mouse_work_fn(mouse_pos.x(), mouse_pos.y())
stop_fn = self.create_stop_mouse_work_fn()
self.panda_app.start_mouse_work("zoom", start_fn, stop_fn)
self.panda_app.mouse_steps = event.angleDelta().y()
def main():
# Initialize Qt environment
pyqt_app = QtWidgets.QApplication(sys.argv)
# Run Panda
panda_app = PandaApp()
# Start the Qt environment
simulation_window = SimulationWindow(panda_app)
simulation_window.showMaximized()
sys.exit(pyqt_app.exec_())
if __name__ == "__main__":
main()