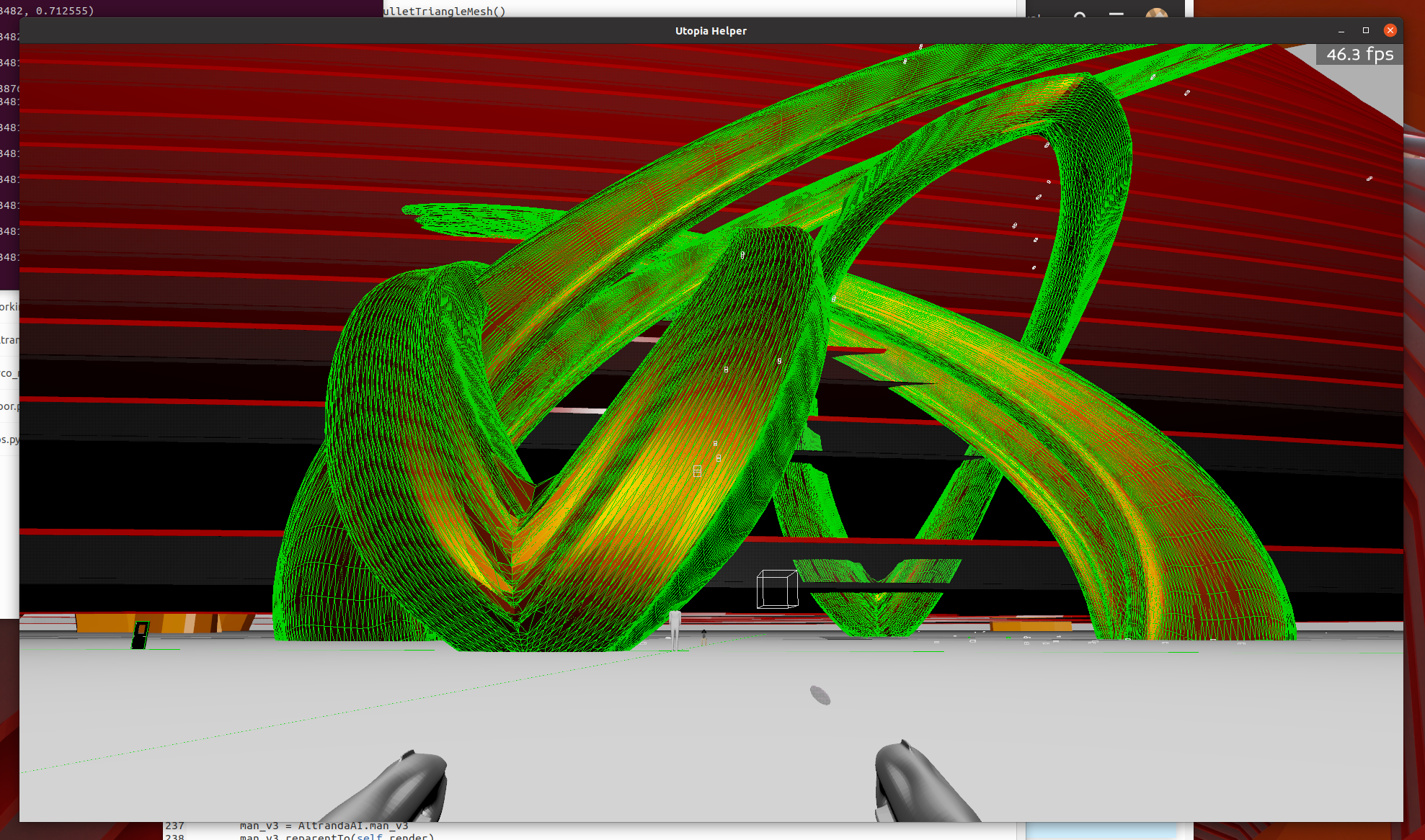
Here is my own technique for automatically generating a Bullet collision mesh from a preloaded model inside Panda3D. The code produces tristrip meshes, which may or may not be ideal for your use case. I believe this code should work the same with .egg, .gltf, and .bam models.
Obviously, this is not the most efficient way to do basic collision modeling, but it has saved me hundreds of hours doing rapid development. The performance penalty is not too bad considering the workflow gains.
Known issue: The fit of the tristrip mesh to the model geometry may change after the original model file changes or is re-exported. I do not have a clean solution for this yet.
def make_collision_from_model(input_model, world):
# tristrip generation from static models
# generic tri-strip collision generator begins
geom_nodes = input_model.findAllMatches('**/+GeomNode')
geom_nodes = geom_nodes.getPath(0).node()
# print(geom_nodes)
geom_target = geom_nodes.getGeom(0)
# print(geom_target)
output_bullet_mesh = BulletTriangleMesh()
output_bullet_mesh.addGeom(geom_target)
tri_shape = BulletTriangleMeshShape(output_bullet_mesh, dynamic=False)
print(output_bullet_mesh)
body = BulletRigidBodyNode('input_model_tri_mesh')
np = self.render.attachNewNode(body)
np.node().addShape(tri_shape)
np.node().setMass(0)
np.node().setFriction(0.5)
# np.setPos(0, 0, 0)
np.setScale(1)
np.setCollideMask(BitMask32.allOn())
world.attachRigidBody(np.node())
make_collision_from_model(access_deck_1, world) # world = BulletWorld()
Edit: I wrapped the logic into a function def for modularity.