Now, I want to use multiples BulletCylinderShape to simulate a stick, and my code is:
import direct.directbase.DirectStart
from panda3d.core import Vec3, TransformState, Point3
from panda3d.bullet import BulletWorld, BulletDebugNode, BulletCylinderShape
from panda3d.bullet import BulletPlaneShape, BulletSphericalConstraint, BulletConeTwistConstraint
from panda3d.bullet import BulletRigidBodyNode
from panda3d.bullet import BulletBoxShape
base.cam.setPos(0, -10, 0)
base.cam.lookAt(0, 0, 0)
debugNode = BulletDebugNode('Debug')
debugNode.showWireframe(True)
debugNode.showConstraints(True)
debugNode.showBoundingBoxes(True)
debugNode.showNormals(False)
debugNP = render.attachNewNode(debugNode)
debugNP.show()
# World
world = BulletWorld()
world.setGravity(Vec3(0, 0, -9.81))
world.setDebugNode(debugNP.node())
# Plane
shape = BulletPlaneShape(Vec3(0, 0, 1), 0)
node = BulletRigidBodyNode('Ground')
node.addShape(shape)
np = render.attachNewNode(node)
np.setPos(0, 0, 0)
world.attachRigidBody(node)
num_segment = 5 # 5段圆柱
segment_length = 1.0
segment_radius = 0.2
shape = BulletCylinderShape(radius=segment_radius, height=segment_length)
previous_node = None
for i in range(num_segment):
node = BulletRigidBodyNode(f'segment_{i}')
node.addShape(shape)
node.setMass(1.0)
if i == 0:
node.set_static(True)
node_path = render.attachNewNode(node)
node_path.setPos(0, 0, segment_length/2)
else:
node_path = render.attachNewNode(node)
node_path.setPos(previous_node_path.get_pos() + Vec3(0, 0, segment_length))
previous_node = node
previous_node_path = node_path
world.attachRigidBody(node)
# Update
def update(task):
dt = globalClock.getDt()
world.doPhysics(dt)
return task.cont
taskMgr.add(update, 'update')
base.run()
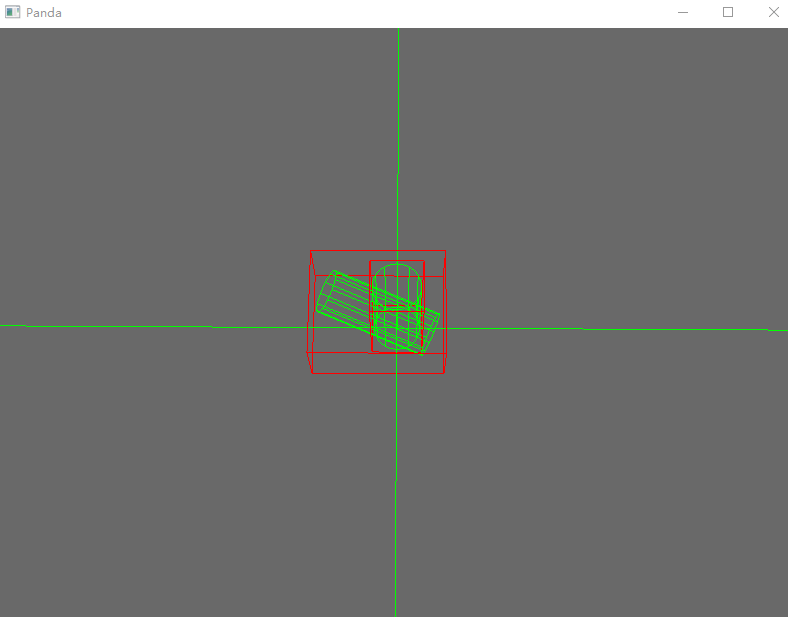
The code can correctly run, and the final result is:
Questions: Why the two cylinders is overlap? Since they are rigid body, I think they should not be overlap. Or how can I overcome the overlap?
You have specified the first segment as static, which is what you expect. Maybe you wanted to do it.
import direct.directbase.DirectStart
from panda3d.core import Vec3, TransformState, Point3
from panda3d.bullet import BulletWorld, BulletDebugNode, BulletCylinderShape
from panda3d.bullet import BulletPlaneShape, BulletSphericalConstraint, BulletConeTwistConstraint
from panda3d.bullet import BulletRigidBodyNode
from panda3d.bullet import BulletBoxShape
base.cam.setPos(0, -10, 0)
base.cam.lookAt(0, 0, 0)
debugNode = BulletDebugNode('Debug')
debugNode.showWireframe(True)
debugNode.showConstraints(True)
debugNode.showBoundingBoxes(True)
debugNode.showNormals(False)
debugNP = render.attachNewNode(debugNode)
debugNP.show()
# World
world = BulletWorld()
world.setGravity(Vec3(0, 0, -9.81))
world.setDebugNode(debugNP.node())
# Plane
shape = BulletPlaneShape(Vec3(0, 0, 1), 0)
node = BulletRigidBodyNode('Ground')
node.addShape(shape)
np = render.attachNewNode(node)
np.setPos(0, 0, 0)
world.attachRigidBody(node)
num_segment = 5 # 5段圆柱
segment_length = 1.0
segment_radius = 0.2
shape = BulletCylinderShape(radius=segment_radius, height=segment_length)
previous_node = None
for i in range(num_segment):
node = BulletRigidBodyNode(f'segment_{i}')
node.addShape(shape)
if i == 0:
node_path = render.attachNewNode(node)
node_path.setPos(0, 0, segment_length/2)
else:
node.setMass(1.0)
node_path = render.attachNewNode(node)
node_path.setPos(previous_node_path.get_pos() + Vec3(0, 0, segment_length))
previous_node = node
previous_node_path = node_path
world.attachRigidBody(node)
# Update
def update(task):
dt = globalClock.getDt()
world.doPhysics(dt)
return task.cont
taskMgr.add(update, 'update')
base.run()
After remove node.set_static(True), there is no overlap.
But, why the static segment would make it overlap?
A static object is not a state of rest. It’s just like a regular mesh.
If it is a regular mesh, why two mesh would overlap?
If I want to make the first segment don’t move (like a wall), and it don’t overlap with other mesh, what should I do?
I kind of explained. A static object is an object that does not interact. What to do I kind of gave an example, study it and draw conclusions.
1 Like