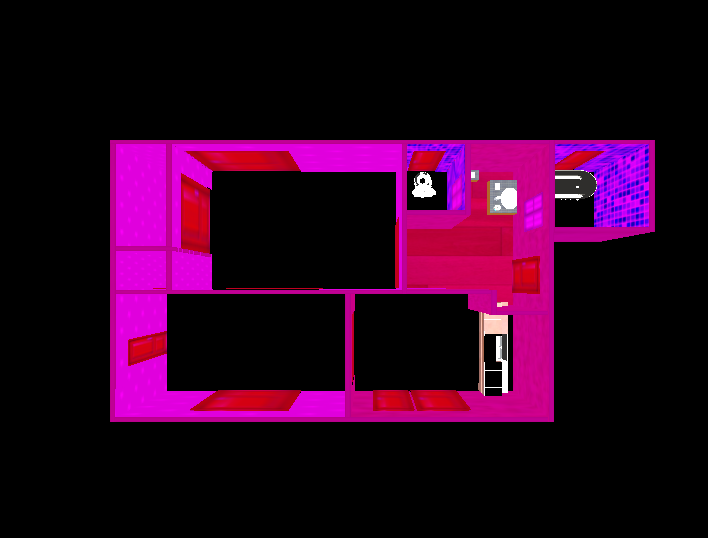
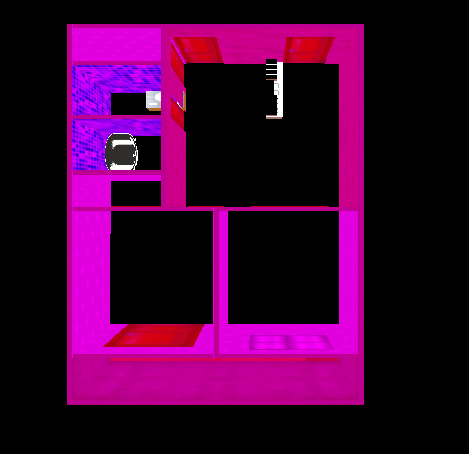
Converting 2d floorplan to 3D model, using GitHub - art-programmer/FloorplanTransformation: Raster-to-Vector: Revisiting Floorplan Transformation. In rendering folder, while after running viewer.py we get the 3d model. But the floor and ceiling is not visible the function for floor and ceiling in floorplan.py is and output is also attached
indent preformatted text by 4 spaces
```def generateFloor(self, data):
floorGroup = EggGroup('floor')
data.addChild(floorGroup)
vp = EggVertexPool('floor_vertex')
floorGroup.addChild(vp)
exteriorWalls = []
for wall in self.walls:
if (wall[4] == 6 or wall[5] == 6):
exteriorWalls.append(copy.deepcopy(wall))
pass
continue
exteriorOpenings = []
for wall in exteriorWalls:
lineDim = calcLineDim((wall[:2], wall[2:4]))
for doorIndex, door in enumerate(self.doors):
if calcLineDim((door[:2], door[2:4])) != lineDim:
continue
if door[lineDim] >= wall[lineDim] and door[2 + lineDim] <= wall[2 + lineDim] and abs(door[1 - lineDim] - wall[1 - lineDim]) <= self.wallWidth:
exteriorOpenings.append(doorIndex)
pass
continue
continue
minDistance = 10000
mainDoorIndex = -1
for icon in self.icons:
if icon[4] == 'entrance':
for doorIndex in exteriorOpenings:
door = self.doors[doorIndex]
distance = pow(pow((door[0] + door[2]) / 2 - (icon[0] + icon[2]) / 2, 2) + pow((door[1] + door[3]) / 2 - (icon[1] + icon[3]) / 2, 2), 0.5)
if distance < minDistance:
minDistance = distance
mainDoorIndex = doorIndex
pass
continue
break
continue
self.startCameraPos = [0.5, -0.5, self.wallHeight * 0.5]
self.startTarget = [0.5, 0.5, self.wallHeight * 0.5]
if mainDoorIndex >= 0:
mainDoor = self.doors[mainDoorIndex]
lineDim = calcLineDim((mainDoor[:2], mainDoor[2:4]))
fixedValue = (mainDoor[1 - lineDim] + mainDoor[3 - lineDim]) / 2
imageSize = [self.width / self.maxDim, self.height / self.maxDim]
side = int(fixedValue < imageSize[1 - lineDim] * 0.5) * 2 - 1
self.startCameraPos[lineDim] = (mainDoor[lineDim] + mainDoor[2 + lineDim]) / 2
self.startTarget[lineDim] = (mainDoor[lineDim] + mainDoor[2 + lineDim]) / 2
self.startCameraPos[1 - lineDim] = fixedValue - 0.5 * side
self.startTarget[1 - lineDim] = fixedValue + 0.5 * side
self.startCameraPos[0] = 1 - self.startCameraPos[0]
self.startTarget[0] = 1 - self.startTarget[0]
pass
newDoors = []
self.windows = []
for doorIndex, door in enumerate(self.doors):
if doorIndex == mainDoorIndex or doorIndex not in exteriorOpenings:
newDoors.append(door)
else:
self.windows.append(door)
pass
continue
self.doors = newDoors
exteriorWallLoops = []
visitedMask = {}
gap = 5.0 / self.maxDim
for wallIndex, wall in enumerate(exteriorWalls):
if wallIndex in visitedMask:
continue
visitedMask[wallIndex] = True
exteriorWallLoop = []
exteriorWallLoop.append(wall)
for loopWall in exteriorWallLoop:
for neighborWallIndex, neighborWall in enumerate(exteriorWalls):
if neighborWallIndex in visitedMask:
continue
#if calcDistance(neighborWall[:2], loopWall[:2]) < gap or calcDistance(neighborWall[2:4], loopWall[:2]) < gap or calcDistance(neighborWall[:2], loopWall[2:4]) < gap or calcDistance(neighborWall[2:4], loopWall[2:4]) < gap:
if calcDistance(neighborWall[:2], loopWall[2:4]) < gap:
exteriorWallLoop.append(neighborWall)
visitedMask[neighborWallIndex] = True
break
elif calcDistance(neighborWall[2:4], loopWall[2:4]) < gap:
neighborWall[0], neighborWall[2] = neighborWall[2], neighborWall[0]
neighborWall[1], neighborWall[3] = neighborWall[3], neighborWall[1]
exteriorWallLoop.append(neighborWall)
visitedMask[neighborWallIndex] = True
break
continue
continue
exteriorWallLoops.append(exteriorWallLoop)
continue
for exteriorWallLoop in exteriorWallLoops:
poly = EggPolygon()
floorGroup.addChild(poly)
poly.setTexture(self.floorMat.getEggTexture())
poly.setMaterial(self.floorMat.getEggMaterial())
for wallIndex, wall in enumerate(exteriorWallLoop):
if wallIndex == 0:
v = EggVertex()
v.setPos(Point3D(1 - wall[0], wall[1], 0))
v.setUv(Point2D(wall[0] * self.maxDim / self.width, 1 - wall[1] * self.maxDim / self.height))
poly.addVertex(vp.addVertex(v))
else:
v = EggVertex()
v.setPos(Point3D(1 - (wall[0] + exteriorWallLoop[wallIndex - 1][2]) / 2, (wall[1] + exteriorWallLoop[wallIndex - 1][3]) / 2, 0))
v.setUv(Point2D((wall[0] + exteriorWallLoop[wallIndex - 1][2]) / 2 * self.maxDim / self.width, 1 - (wall[1] + exteriorWallLoop[wallIndex - 1][3]) / 2 * self.maxDim / self.height))
poly.addVertex(vp.addVertex(v))
pass
if wallIndex == len(exteriorWallLoop) - 1:
v = EggVertex()
v.setPos(Point3D(1 - wall[2], wall[3], 0))
v.setUv(Point2D(wall[2] * self.maxDim / self.width, 1 - wall[3] * self.maxDim / self.height))
poly.addVertex(vp.addVertex(v))
pass
continue
continue
ceilingGroup = EggGroup('ceiling')
data.addChild(ceilingGroup)
vp = EggVertexPool('ceiling_vertex')
ceilingGroup.addChild(vp)
for exteriorWallLoop in exteriorWallLoops:
poly = EggPolygon()
ceilingGroup.addChild(poly)
poly.setTexture(self.ceilingMat.getEggTexture())
poly.setMaterial(self.ceilingMat.getEggMaterial())
for wallIndex, wall in enumerate(exteriorWallLoop):
if wallIndex == 0:
v = EggVertex()
v.setPos(Point3D(1 - wall[0], wall[1], self.wallHeight))
v.setUv(Point2D(wall[0], 1 - wall[1]))
poly.addVertex(vp.addVertex(v))
else:
v = EggVertex()
v.setPos(Point3D(1 - (wall[0] + exteriorWallLoop[wallIndex - 1][2]) / 2, (wall[1] + exteriorWallLoop[wallIndex - 1][3]) / 2, self.wallHeight))
v.setUv(Point2D((wall[0] + exteriorWallLoop[wallIndex - 1][2]) / 2, 1 - (wall[1] + exteriorWallLoop[wallIndex - 1][3]) / 2))
poly.addVertex(vp.addVertex(v))
pass
if wallIndex == len(exteriorWallLoop) - 1:
v = EggVertex()
v.setPos(Point3D(1 - wall[2], wall[3], self.wallHeight))
v.setUv(Point2D(wall[2], 1 - wall[3]))
poly.addVertex(vp.addVertex(v))
pass
continue
continue
return
Actually I'm not well aware with the code, so couldn't change anything carelessly, anyone who understood the code, please suggest what change should be done,