Hi community,
Thanks for your help (especially @rdb )! Our driving simulator is released on github page.
In our repo, you can find several basic usages of panda3d, including: bulletVehicle, bullet continuous collision detection, bullet rayCastTest(), flattenStrong(), rigidBodyCombiner, creating skybox/terrain, headless machine offscreen buffer, gles pbr/skybox shader, render to texture, offscreen buffer, onscreenMessage and so on. We also include an RL AI driver in this repo and release its training code.
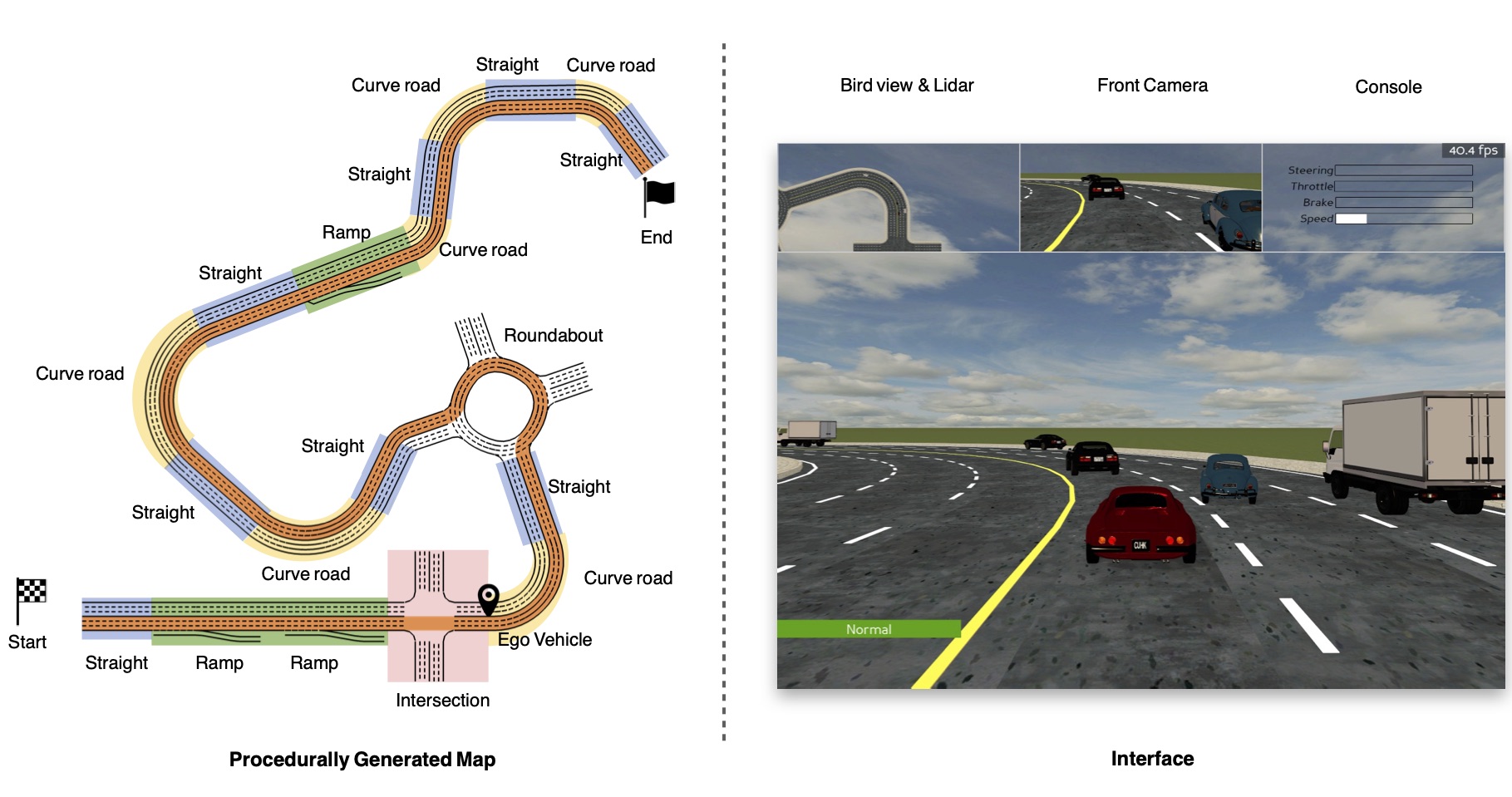
PGDrive aims to provide a lightweight, efficient autonomous driving training environment. We first conduct several interesting experiments on the generalization ability of reinforcement agent. It can also support other research topics about self-driving by leveraging the power of panda3d which provides PGDrive with rgb camera, depth camera, lidar, PID controller and other basic module of self-driving vehicle.