Hi,
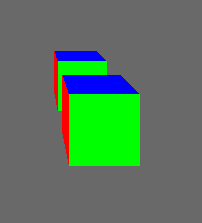
does anyone have any idea why depth information is not taken into account when rendering two cubes with the “graphicsEngine.make_output”? In the example code below, box_a is simply drawn in front of box_b, regardless of whether it is actually spatially in front of or behind box_b:
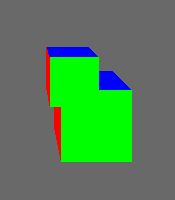
vs.
import cv2 as cv
import numpy as np
from direct.showbase.ShowBase import ShowBase
from panda3d.core import FrameBufferProperties, WindowProperties, GraphicsPipe, GraphicsOutput
from panda3d.core import Texture, PerspectiveLens
class SceneSimulator(ShowBase):
IMAGE_CAMERA_RENDER_ORDER = -2
def __init__(self):
ShowBase.__init__(self, fStartDirect=True, windowType='offscreen')
def render_image(self, pos, name=None):
# set up texture and graphics buffer
window_props = WindowProperties.size(540, 540)
frame_buffer_props = FrameBufferProperties()
buffer = self.graphicsEngine.make_output(self.pipe,
f'Image Buffer [{name}]',
self.IMAGE_CAMERA_RENDER_ORDER,
frame_buffer_props,
window_props,
GraphicsPipe.BFRefuseWindow, # don't open a window
self.win.getGsg(),
self.win
)
texture = Texture()
buffer.addRenderTexture(texture, GraphicsOutput.RTMCopyRam)
lens = PerspectiveLens()
lens.set_film_size((540, 540))
lens.set_fov(80)
lens.set_near_far(0.1, 1000)
camera = self.makeCamera(buffer, lens=lens, camName=f'Image Camera [{name}]')
camera.reparentTo(self.render)
camera.setPos(*pos)
self.graphics_engine.render_frame()
tex = buffer.getTexture()
data = tex.getRamImage()
image = np.frombuffer(data, np.uint8)
image.shape = (tex.getYSize(), tex.getXSize(), tex.getNumComponents())
return np.flipud(image)
if __name__ == '__main__':
sim = SceneSimulator()
box_b = sim.loader.loadModel("models/misc/rgbCube")
box_b.setPos((1, 0, 0)) # change to position (1,2,0)
box_b.reparentTo(sim.render)
box_a = sim.loader.loadModel("models/misc/rgbCube")
box_a.setPos((1, 2, 0)) # change to position (1,0,0)
box_a.reparentTo(sim.render)
out = sim.render_image((0, -5, 2))
cv.imshow("frame", out)
cv.waitKey(0)
