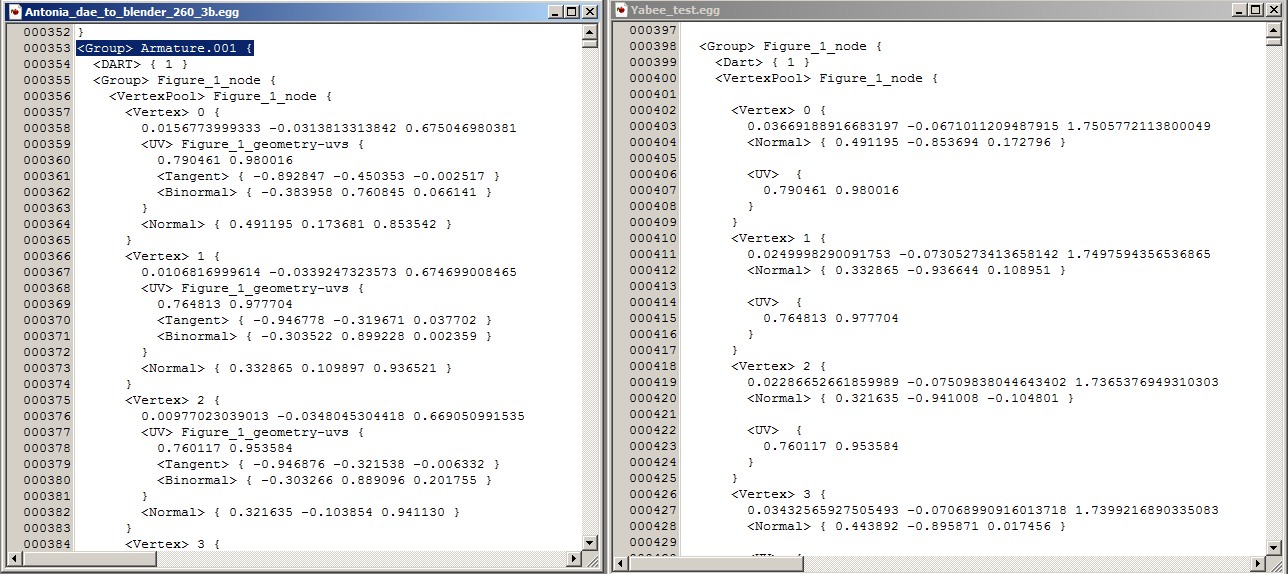
I am trying to get the Poser2egg.py exporter working fully, to finish the abandoned project at https://github.com/is-blackhole/poser2egg. The effort is going well, aside from trouble with the matrix handling for the joint transforms. The only information I have about the formatting of these matrices is from the eggSyntax documentation at http://panda3d.cvs.sourceforge.net/panda3d/panda/src/doc/eggSyntax.txt?view=markup and whatever I can extrapolate from the Blender .egg export scripts. So far these sources aren’t leading me in the right direction.
In Blender the exporter seems to use the usual Blender process of modifying the armature bone rest matrix for each joint by the inverse rest matrix of its parent. In Blender, this is a fairly simple and common process. In Poser, it is a bit more obscure. Poser offers no built-in equivalent to the armature rest matrix, so I need to try to construct it. This involves a bunch of assumptions which apparently aren’t correct. I assumed that I needed to include information about each joint’s origin and orientation in the matrix. It seems like this information needs to be included somewhere in the .egg file, and this seems to be where it should go. But… no dice. The results are bad with every variation on this idea that I attempt. I need to understand more about what Panda3D wants in the Transform matrix of the .egg file.
Does anyone know anything about this? I’ve been sort of groping along blindly, and at this point any hints or revelations would be helpful. What does Panda need, in a Transform matrix?
Also, hiya.  I am new to this community and about a week into trying to work with Panda 3D. I’ve worked with Poser, Blender, Game Maker, and Dark Basic Pro in the past, and I’m pleased to find a way to bring Python coding, 3D graphics, and game creation together in a single bundle. I’m excited about Panda, but current efforts have stalled while I try to find a path to covert parts of my projects from other software packages into Panda’s file formats.
I am new to this community and about a week into trying to work with Panda 3D. I’ve worked with Poser, Blender, Game Maker, and Dark Basic Pro in the past, and I’m pleased to find a way to bring Python coding, 3D graphics, and game creation together in a single bundle. I’m excited about Panda, but current efforts have stalled while I try to find a path to covert parts of my projects from other software packages into Panda’s file formats.

 ) However, if I did make that mistake, I’m really not sure how should be stated in a file.
) However, if I did make that mistake, I’m really not sure how should be stated in a file. I had to construct my own rotation matrices, again using the known joint order of each actor. This was derived from the input dial settings in Poser, and the resulting matrix was multiplied by the joint matrix for each actor. The final step, after conversion back to Euler, was re-ordering the rotations. Poser’s XYZ had to become YZX for Panda, with the Z sign flipped in cases where Y had been the twist axis in Poser. And all of that seems to do it.
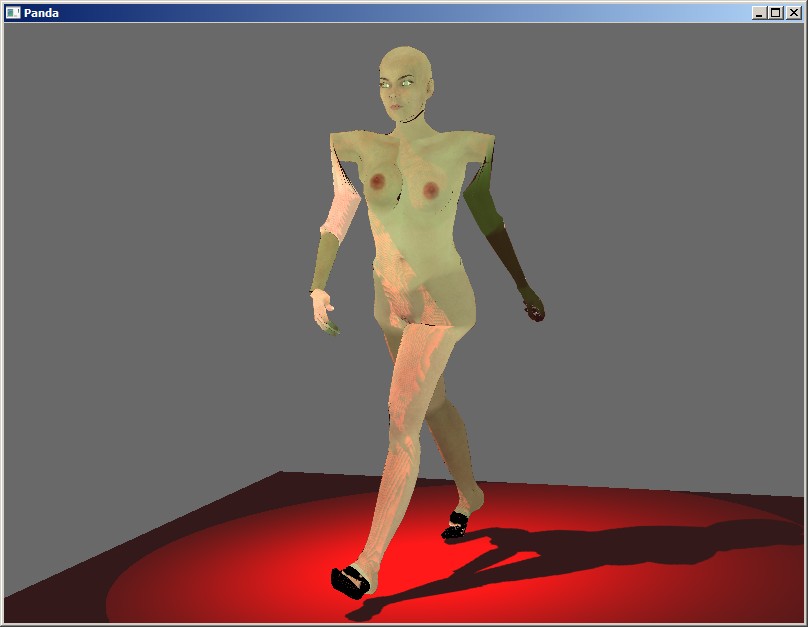
I had to construct my own rotation matrices, again using the known joint order of each actor. This was derived from the input dial settings in Poser, and the resulting matrix was multiplied by the joint matrix for each actor. The final step, after conversion back to Euler, was re-ordering the rotations. Poser’s XYZ had to become YZX for Panda, with the Z sign flipped in cases where Y had been the twist axis in Poser. And all of that seems to do it. And it still isn’t quite there. Mostly. Further testing revealed some anomalies, and after a few days of testing I ended up back where Sartori started, with the Matrix handling. Sending an identity matrix with the proper joint centers gives the best results so far, but that leaves out any additional joint orientation when a joint is not aligned with an axis. As a result, most rotations on my test figure are correct, but the forearms, hands and fingers bend incorrectly.
And it still isn’t quite there. Mostly. Further testing revealed some anomalies, and after a few days of testing I ended up back where Sartori started, with the Matrix handling. Sending an identity matrix with the proper joint centers gives the best results so far, but that leaves out any additional joint orientation when a joint is not aligned with an axis. As a result, most rotations on my test figure are correct, but the forearms, hands and fingers bend incorrectly. Every resource I can find which relates to this issue says the same thing: modify a joint’s rest position matrix by the inverse of its parent’s rest position matrix. Unfortunately every resource starts with those rest position matrices being already available. In Poser, I need to calculate them, which is our problem.
Every resource I can find which relates to this issue says the same thing: modify a joint’s rest position matrix by the inverse of its parent’s rest position matrix. Unfortunately every resource starts with those rest position matrices being already available. In Poser, I need to calculate them, which is our problem.