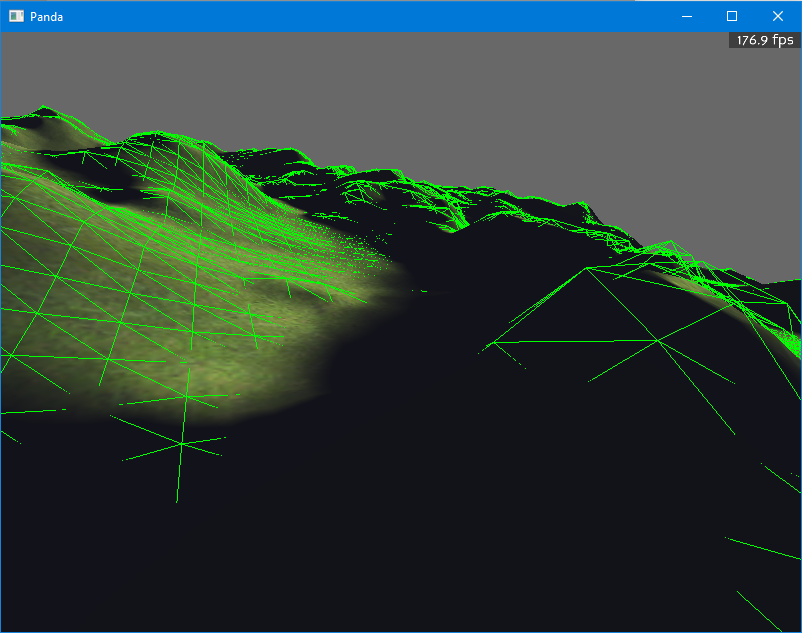
I haven’t used either tool, confessedly, but from the screenshot it looks like the two heightfields have different vertical extents. Without scaling the collision-node (which may interfere with its working, I fear), is there a means of adjusting their heights?
I don’t know what I should change to test your hypothesis, but on the background on the right edge of the screenshot you can see another area with a flatly rising terrain. The height of that is reproduced “exactly”, except at the edge where the texture goes above the collision mesh until it reaches the “center of the edge”, and then the collision mesh is the one that is above, until they converge to the same height. So I don’t think it’s a scaling issue.
Hmm… I see. At a guess, it might be a difference in the points being sampled by each system, then. But what to do about that–if indeed it is the problem–I don’t know, I’m afraid!
Hey, thanks for the tip to enlarge the BulletHeightfieldShape’s image by 1 pixel. I now do it with the Pillow library using the Image.BILINEAR algorithm for pretty good results, I feel.