#from pandac.PandaModules import loadPrcFileData
#loadPrcFileData(‘’, ‘load-display tinydisplay’)
#loadPrcFileData(‘’, ‘bullet-additional-damping true’)
#loadPrcFileData(‘’, ‘bullet-additional-damping-linear-factor 0.005’)
#loadPrcFileData(‘’, ‘bullet-additional-damping-angular-factor 0.01’)
#loadPrcFileData(‘’, ‘bullet-additional-damping-linear-threshold 0.01’)
#loadPrcFileData(‘’, ‘bullet-additional-damping-angular-threshold 0.01’)
import sys
import direct.directbase.DirectStart
from direct.showbase.DirectObject import DirectObject
from direct.showbase.InputStateGlobal import inputState
from panda3d.core import AmbientLight
from panda3d.core import DirectionalLight
from panda3d.core import Vec3
from panda3d.core import Vec4
from panda3d.core import Point3
from panda3d.core import TransformState
from panda3d.core import BitMask32
from panda3d.bullet import BulletWorld
from panda3d.bullet import BulletPlaneShape
from panda3d.bullet import BulletRigidBodyNode
from panda3d.bullet import BulletDebugNode
from panda3d.bullet import BulletConeShape
from panda3d.bullet import BulletConvexHullShape
from panda3d.bullet import BulletTriangleMesh
from panda3d.bullet import BulletTriangleMeshShape
from panda3d.core import CollisionSegment
from panda3d.core import CollisionRay
from panda3d.core import CollisionNode
from panda3d.core import CollisionHandlerFloor
from panda3d.bullet import BulletSliderConstraint
from panda3d.bullet import BulletBoxShape
from panda3d.bullet import BulletHingeConstraint
from panda3d.bullet import BulletContactResult
from panda3d.bullet import BulletGhostNode
global a,b,c,d
a=0;b=0;c=0;d=0
class Game(DirectObject):
def init(self):
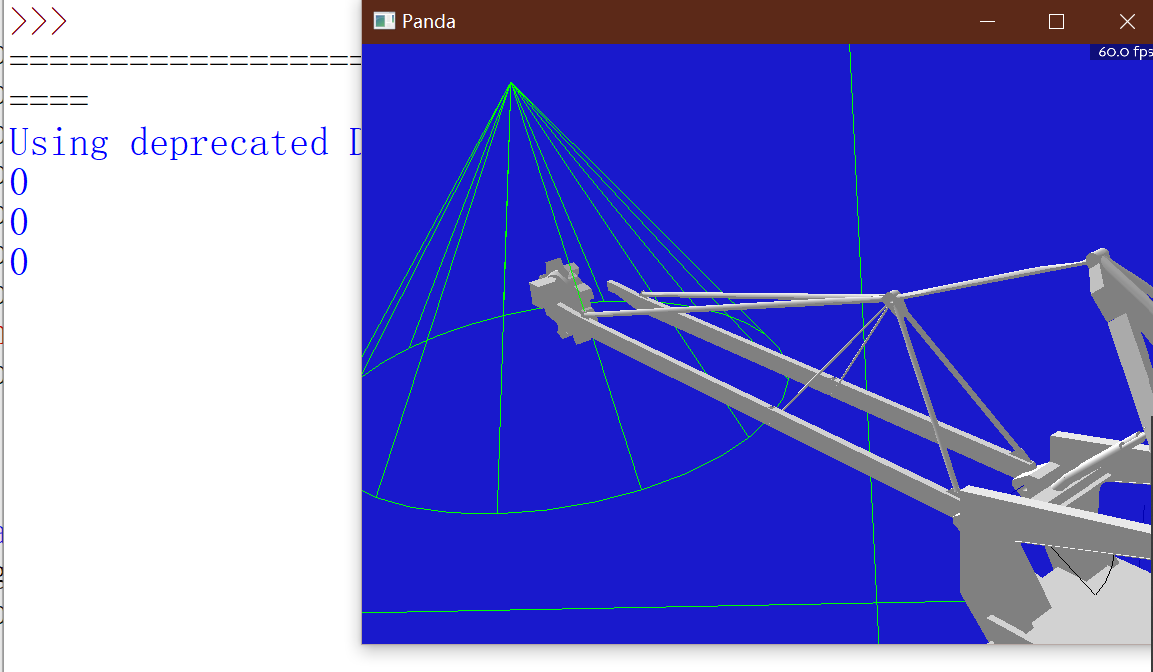
base.setBackgroundColor(0.1, 0.1, 0.8, 1)
base.setFrameRateMeter(True)
base.cam.setPos(0, -20, 4)
base.cam.lookAt(0, 0, 0)
# Light
alight = AmbientLight('ambientLight')
alight.setColor(Vec4(0.5, 0.5, 0.5, 1))
alightNP = render.attachNewNode(alight)
dlight = DirectionalLight('directionalLight')
dlight.setDirection(Vec3(1, 1, -1))
dlight.setColor(Vec4(0.7, 0.7, 0.7, 1))
dlightNP = render.attachNewNode(dlight)
render.clearLight()
render.setLight(alightNP)
render.setLight(dlightNP)
# Input
self.accept('escape', self.doExit)
self.accept('r', self.doReset)
self.accept('f1', self.toggleWireframe)
self.accept('f2', self.toggleTexture)
self.accept('f3', self.toggleDebug)
self.accept('f5', self.doScreenshot)
inputState.watchWithModifiers('up', 'w')
inputState.watchWithModifiers('down', 's')
inputState.watchWithModifiers('left', 'a')
inputState.watchWithModifiers('right', 'd')
inputState.watchWithModifiers('turnLeft', 'q')
inputState.watchWithModifiers('turnRight', 'e')
inputState.watchWithModifiers('dis', 'f')
inputState.watchWithModifiers('get', 'g')
# Task
taskMgr.add(self.update, 'updateWorld')
# Physics
self.setup()
HANDLER
def doExit(self):
self.cleanup()
sys.exit(1)
def doReset(self):
self.cleanup()
self.setup()
def toggleWireframe(self):
base.toggleWireframe()
def toggleTexture(self):
base.toggleTexture()
def toggleDebug(self):
if self.debugNP.isHidden():
self.debugNP.show()
else:
self.debugNP.hide()
def doScreenshot(self):
base.screenshot(‘Bullet’)
_TASK
def processInput(self, dt):
force = Vec3(0, 0, 0)
torque = Vec3(0, 0, 0)
torque1 = Vec3(0, 0, 0)
global a,b,c,d
if inputState.isSet('left'): self.bodyNP.setPos(a, 5, -2);a=a+0.01
if inputState.isSet('right'): self.bodyNP.setPos(a, 5, -2);a=a-0.01
if inputState.isSet('turnLeft'): self.body1NP.setHpr(b, 0, 0);b=b+0.1
if inputState.isSet('turnRight'): self.body1NP.setHpr(b, 0, 0);b=b-0.1
if inputState.isSet('up'): self.body2NP.setHpr(b, 0, c);c=c+0.1
if inputState.isSet('down'): self.body2NP.setHpr(b, 0, c);c=c-0.1
if inputState.isSet('dis'): print (self.body2NP.getDistance(self.cone1NP))
#if inputState.isSet('get'): print (self.world.contactTest(self.coneNP.node()).getNumContacts())
if inputState.isSet('get'): print (self.world.contactTestPair(self.cone1NP.node(), self.body2NP.node()).getNumContacts())
def update(self, task):
dt = globalClock.getDt()
self.processInput(dt)
#self.world.doPhysics(dt)
self.world.doPhysics(dt, 5, 1.0/180.0)
return task.cont
def cleanup(self):
self.world.removeRigidBody(self.groundNP.node())
self.world.removeRigidBody(self.coneNP.node())
self.world.removeRigidBody(self.bodyNP.node())
self.world.removeRigidBody(self.body2NP.node())
self.world.removeRigidBody(self.body1NP.node())
self.world = None
self.debugNP = None
self.groundNP = None
self.coneNP = None
self.cone1NP = None
self.bodyNP = None
self.body1NP = None
self.body2NP = None
self.worldNP.removeNode()
def setup(self):
self.worldNP = render.attachNewNode(‘World’)
# World
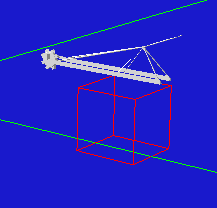
self.debugNP = self.worldNP.attachNewNode(BulletDebugNode('Debug'))
self.debugNP.show()
self.debugNP.node().showWireframe(True)
self.debugNP.node().showConstraints(True)
self.debugNP.node().showBoundingBoxes(False)
self.debugNP.node().showNormals(True)
#self.debugNP.showTightBounds()
#self.debugNP.showBounds()
self.world = BulletWorld()
self.world.setGravity(Vec3(0, 0, 0))
self.world.setDebugNode(self.debugNP.node())
# Ground (static)
shape = BulletPlaneShape(Vec3(0, 0, 1), 0)
self.groundNP = self.worldNP.attachNewNode(BulletRigidBodyNode('Ground'))
self.groundNP.node().addShape(shape)
self.groundNP.setPos(0, 0, -2)
self.groundNP.setCollideMask(BitMask32.allOn())
self.world.attachRigidBody(self.groundNP.node())
# Cone (dynamic)
radius = 0.6
height = 0.8
shape = BulletConeShape(radius, height, 2)
self.coneNP = self.worldNP.attachNewNode(BulletRigidBodyNode('cone'))
#self.coneNP.node().setMass(1.0)
self.coneNP.node().addShape(shape)
self.coneNP.setPos(5,5,-2)
#self.coneNP.setScale(2, 1, 0.5)
self.coneNP.setCollideMask(BitMask32.allOn())
#self.coneNP.node().setDeactivationEnabled(False)
self.world.attachRigidBody(self.coneNP.node())
# Cone1 (dynamic)
radius = 6
height = 8
shape = BulletConeShape(radius, height, 2)
self.cone1NP = self.worldNP.attachNewNode(BulletRigidBodyNode('cone1'))
self.cone1NP.node().setMass(1.0)
self.cone1NP.node().addShape(shape)
self.cone1NP.setPos(-8,-8,3)
#self.coneNP.setScale(2, 1, 0.5)
self.cone1NP.setCollideMask(BitMask32.allOn())
#self.coneNP.node().setDeactivationEnabled(False)
self.world.attachRigidBody(self.cone1NP.node())
# Body
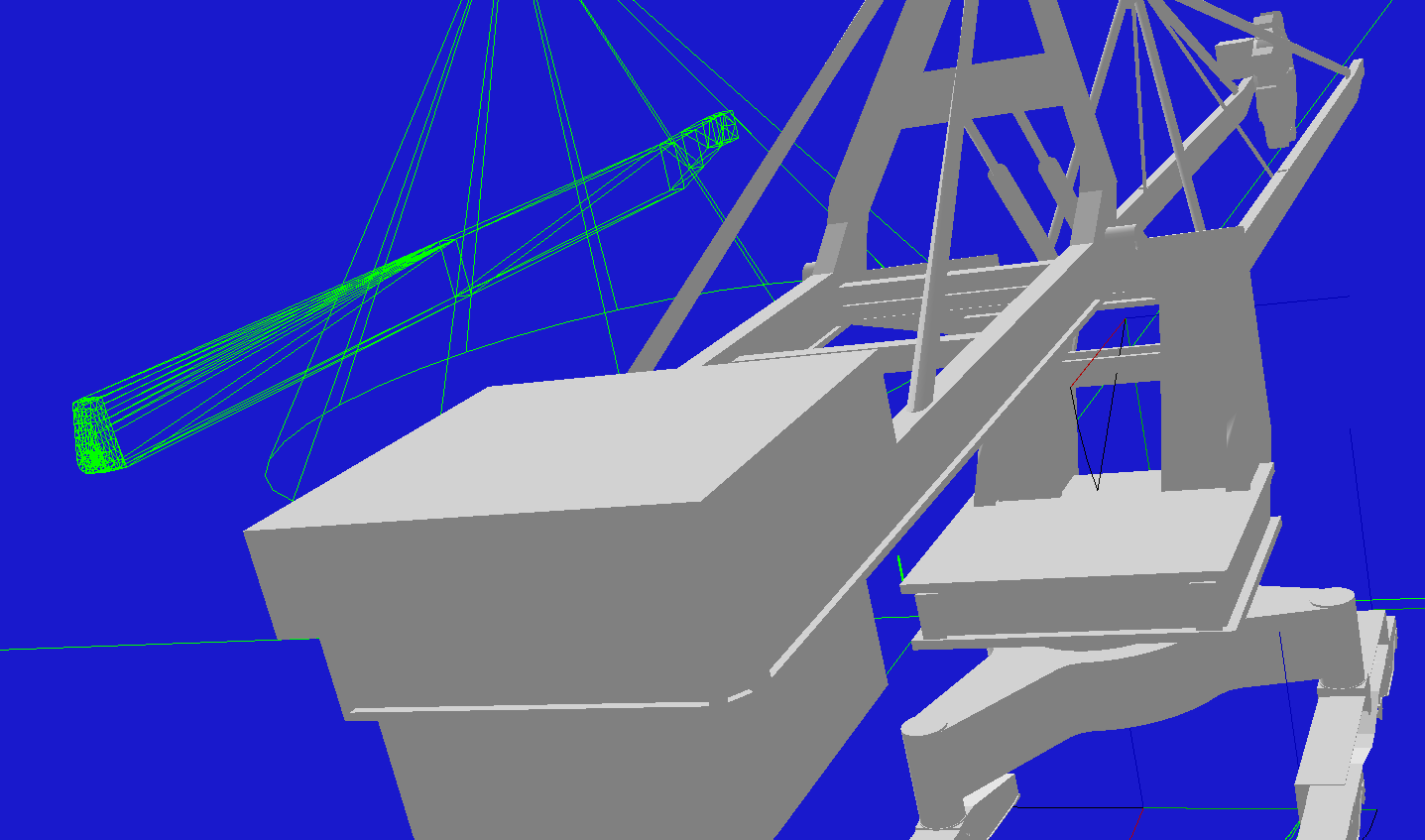
visNP = loader.loadModel('models/body.egg')
geom = visNP.findAllMatches('**/+GeomNode').getPath(0).node().getGeom(0)
mesh = BulletTriangleMesh()
#mesh=BulletConvexHullShape()
mesh.addGeom(geom)
shape = BulletTriangleMeshShape(mesh, dynamic=True)
self.bodyNP = self.worldNP.attachNewNode(BulletRigidBodyNode('body'))
self.bodyNP.node().addShape(shape)
self.bodyNP.node().setMass(100)
self.bodyNP.node().setInertia(Vec3(100000000,100000000,100000000))
self.bodyNP.setPos(0, 0, -1)
self.bodyNP.setCollideMask(BitMask32.allOn())
self.world.attachRigidBody(self.bodyNP.node())
visNP.reparentTo(self.bodyNP)
self.bodyNP.setScale(6)
#Body1
visNP = loader.loadModel('models/body1.egg')
geom = visNP.findAllMatches('**/+GeomNode').getPath(0).node().getGeom(0)
#mesh1 = BulletTriangleMesh()
mesh1=BulletConvexHullShape()
mesh1.addGeom(geom)
#shape = BulletTriangleMeshShape(mesh, dynamic=True)
self.body1NP = self.worldNP.attachNewNode(BulletRigidBodyNode('body1'))
self.body1NP.node().addShape(shape)
self.body1NP.node().setMass(10)
self.body1NP.node().setInertia(Vec3(100000000,100000000,100000000))
self.body1NP.setPos(0, 10, 0)
self.body1NP.setCollideMask(BitMask32.allOn())
self.world.attachRigidBody(self.body1NP.node())
visNP.reparentTo(self.body1NP)
self.body1NP.setScale(6)
#Body2
visNP = loader.loadModel('models/arm.egg')
geom = visNP.findAllMatches('**/+GeomNode').getPath(0).node().getGeom(0)
mesh2 = BulletTriangleMesh()
#mesh2=BulletConvexHullShape()
mesh2.addGeom(geom)
shape = BulletTriangleMeshShape(mesh2, dynamic=True)
self.body2NP = self.worldNP.attachNewNode(BulletRigidBodyNode('body2'))
self.body2NP.node().addShape(shape)
self.body2NP.node().setMass(10)
self.body2NP.node().setInertia(Vec3(10000,10000,10000))
self.body2NP.setPos(0, 10, 0)
self.body2NP.setCollideMask(BitMask32.allOn())
self.world.attachRigidBody(self.body2NP.node())
visNP.reparentTo(self.body2NP)
self.body2NP.setScale(6)
# Slider
frameA = TransformState.makePosHpr(Point3(0, 0, 0), Vec3(0, 0, 0))
frameB = TransformState.makePosHpr(Point3(0, 0, 0), Vec3(0, 0, 0))
slider =BulletSliderConstraint(self.bodyNP.node(),self.coneNP.node(),frameA,frameB, True)
slider.setDebugDrawSize(2.0)
slider.setLowerLinearLimit(0)
slider.setUpperLinearLimit(20)
#slider.setLowerAngularLimit(0)
#slider.setUpperAngularLimit(0)
self.world.attachConstraint(slider)
# Hinge1
pivotA = Point3(4, -1.55, 0)
pivotB = Point3(5.5, 1, 0)
axisA = Vec3(0, 0, 1)
axisB = Vec3(0, 0, 1)
hinge1 = BulletHingeConstraint(self.bodyNP.node(), self.body1NP.node(), pivotA, pivotB, axisA, axisB, True)
hinge1.setDebugDrawSize(2.0)
hinge1.setLimit(-90, 90, softness=0.9, bias=0.1, relaxation=1.0)
self.world.attachConstraint(hinge1)
# Hinge2
pivotC = Point3(3.55, 1, 3.9)
pivotD = Point3(3.55, 1, 3.9)
axisC = Vec3(0, 1, 0)
axisD = Vec3(0, 1, 0)
hinge2 = BulletHingeConstraint(self.body1NP.node(), self.body2NP.node(), pivotC, pivotD, axisC, axisD, True)
hinge2.setDebugDrawSize(2.0)
hinge2.setLimit(0, 30, softness=0.9, bias=0.1, relaxation=1.0)
self.world.attachConstraint(hinge2)
game = Game()
run()