Thanks for your reply.
I followed your instructions and added graphics_engine->render_frame() finally it works 
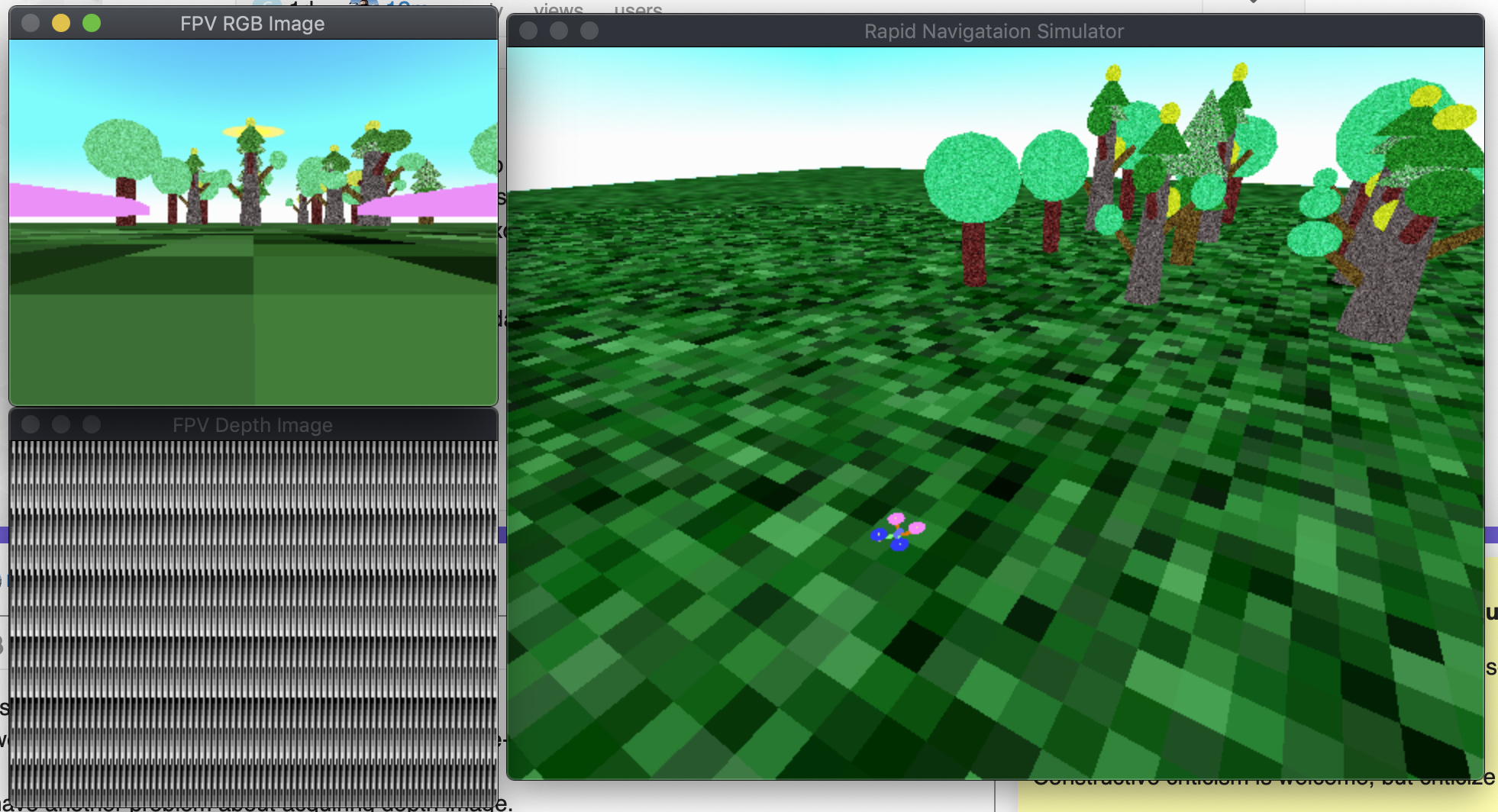
But now I have another problem about acquiring depth image. A similar topic was discussed and I followed its codes but unfortunately it didn’t work for me. As you see above, the depth image is incorrect. Something wrong also displayed:
Known pipe types:
CocoaGraphicsPipe
(all display modules loaded.)
:display:gsg:glgsg(error): GL error 0x502 : invalid operation
:display:gsg:glgsg(error): An OpenGL error has occurred. Set gl-check-errors #t in your PRC file to display more information.
:display:gsg:glgsg(error): GL error 0x502 : invalid operation
:display:gsg:glgsg(error): An OpenGL error has occurred. Set gl-check-errors #t in your PRC file to display more information.
This is my codes:
void Scene::setup_depth_camera() {
WindowProperties _wp;
panda_framework->get_default_window_props(_wp);
_wp.set_title(_name);
_wp.set_size(320, 240);
FrameBufferProperties _fbp;
_fbp.set_rgb_color(true);
_fbp.set_alpha_bits(1);
_fbp.set_depth_bits(1);
auto _gpo = window_framework->get_graphics_output();
auto _buffer_depth = panda_framework->get_graphics_engine()->make_output(panda_framework->get_default_pipe(), _name,
-2, _fbp, _wp, GraphicsPipe::BF_refuse_window, _gpo->get_gsg(), _gpo);
auto _texture_depth = new Texture();
_buffer_depth->add_render_texture(_texture_depth, GraphicsOutput::RTM_copy_ram, GraphicsOutput::RTP_depth_stencil);
_texture_depth->set_minfilter(Texture::FilterType::FT_shadow);
_texture_depth->set_magfilter(Texture::FilterType::FT_shadow);
auto _camera_depth = new Camera(_name + "_Depth");
auto _lens_d = _camera_depth->get_lens();
_lens_d->set_fov(90, 60);
//_lens_d->set_focal_length(0.028);
_lens_d->set_film_size(0.032, 0.024);
_lens_d->set_near(0.05);
_lens_d->set_far(100);
auto _camera_depth_np = window_framework->get_render().attach_new_node(_camera_depth);
_camera_depth_np.set_pos(0.05, 0.0, 0.1);
_camera_depth_np.set_hpr(-90, 0, 0);
auto _region_depth = _buffer_depth->make_display_region();
_region_depth->set_camera(_camera_depth_np);
_camera_depth_np.reparent_to(window_framework->get_render());
auto shader = Shader::load(Shader::SL_GLSL, "glsl-simple.vert", "glsl-simple.frag");
_camera_depth_np.set_shader(shader);
}
void Scene::get_depth_image(cv::Mat &image) {
if(_texture_depth->might_have_ram_image()) {
CPTA_uchar _pic = _texture_depth->get_ram_image();
void *_ptr = (void *) _pic.p();
image = cv::Mat(_texture->get_y_size(), _texture->get_x_size(), CV_8UC(_texture->get_num_components()), _ptr,
cv::Mat::AUTO_STEP);
cv::flip(image, image, 0);
}
}